
Researchers at EPFL have developed the first system that enables four-arm laparoscopic surgery by controlling two additional robotic arms via haptic foot interfaces.
Roboticists at EPFL have combined multi-limb manipulation with advanced shared-control augmentation for an unprecedented advance in the field of laparoscopic surgery. The results, published in The International Journal of Robotics Research, confirm the feasibility of the setup for reducing surgeon workload and improving precision and safety. Specialists have already been successfully trained on the system and clinical trials are ongoing in Geneva.
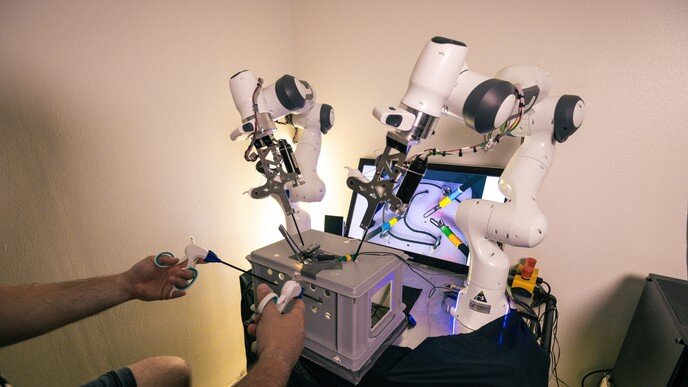
In a tight collaboration between the research group REHAssist and the Learning Algorithms and Systems Laboratory (LASA), Ph.D. students Jacob Hernandez and Walid Amanhoud and a team of researchers developed a system that allows surgeons, in addition to their two natural arms, to control two additional robotic arms using haptic foot interfaces with five degrees of freedom. Each hand controls a manipulative instrument, while one foot controls an endoscope/camera, and another foot controls an actuated gripper.
One key innovation of this system lies in the shared control between the surgeon and the robotic assistants. The control framework developed by the researchers ensures that the surgeon and robots can work collaboratively within a concurrent workspace while meeting the precision and safety demands of laparoscopic surgery.
According to Mohamed Bouri, head of the group REHAssist, “Actuators in the foot pedals give haptic feedback to the user, guiding the foot towards the target as if following an invisible field-of-forces, and also limit force and movement to ensure that erroneous feet movements do not endanger the patient.” Bouri goes on to say, “Our system opens up new possibilities for surgeons to perform 4-handed laparoscopic procedures, allowing a single person to do a task that is usually performed by two, sometimes three people.”
Minimizing fatigue
Known as shared control, the robotics sometimes lead the surgeon’s control of the instrument as they predict where the surgeon wants to move. When tying a knot for example, the endoscope adjusts into the proper position and the gripper could move out of the way.
“Controlling four arms simultaneously, moreover with one’s feet, is far from routine and can be quite tiring. To reduce the complexity of the control, the robots actively assist the surgeon by coordinating their movements with the surgeon’s through active prediction of the surgeon’s intent and adaptive visual tracking of laparoscopic instruments with the camera. Additionally, assistance is offered for more accurate grasping of the tissues,” says Professor Aude Billard, head of LASA.
Bouri adds, “By incorporating foot-controlled robotic assistants and shared control strategies, we reduce the mental and physical load on surgeons and we hypothesize to improve surgical outcomes.”
Collaboration with surgeons
A comprehensive user study with practicing surgeons was conducted to evaluate the system’s ease of use and effectiveness. According to Dr. Enrico Broennimann, who has participated in the trials in a collaboration with the Swiss Foundation for Innovation and Training in Surgery (SFITS), “The idea to actively use one’s feet to perform robotic-assisted surgery is a good idea, and it’s definitely a learnable skill. I’d like to see it implemented in the operating room, perhaps as a cockpit well away from the patient to increase ergonomics.”
While the system continues to be tested and improved, the results published in this study confirm the feasibility of performing four-arm surgical-like tasks without intensive training. The shared-control strategies implemented in the system were found to reduce task load, improve performance, increase fluency, and enhance coordination during laparoscopic tasks.
More information:
Jacob Hernandez Sanchez et al, Enabling four-arm laparoscopic surgery by controlling two robotic assistants via haptic foot interfaces, The International Journal of Robotics Research (2023). DOI: 10.1177/02783649231180366
Journal information:
International Journal of Robotics Research
Source: Read Full Article